Puls inductie metaaldetector met DSP
Inleiding in metaaldetectie
De meeste metaaldetectoren werken op het principe dat metalen in een magnetisch veld het gedrag van dat veld veranderen. En zijn twee algemene benaderingen om deze veranderingen te detecteren. In één toepassing wordt een wisselstroom aan een zendspoel geleverd. Een ontvangstspoel wordt gebruikt om het magnetische veld op te piken dat wordt gegenereerd door de zender. Wanneer metaal binnen de reikwijdte van de magnetische veldlijnen komt kan de ontvangstspoel dit detecteren door een verandering in zowel de amplitude als de fase van het ontvangen signaal. De grootte van de wijziging in amplitude en fase zijn een indicatie voor de afmeting en afstand van het metaal, en kunnen ook gebruikt worden om onderscheid te maken tussen magnetiseerbare en niet magnetiseerbare metalen.
In de andere benadering worden stroompulsen toegeleverd aan de zendspoel. Het magnetische veld dat door deze pulsen wordt opgewekt veroorzaakt wervelstromen in metalen dicht bij de spoel. Wanneer het magnetische veld snel genoeg wordt afgeschakeld kunnen deze wervelstromen worden gedetecteerd met de zendspoel, die dan dienst doet als ontvanger.
Pulse inductie kan vaak diepere objecten bereiken dan op frequentie gebaseerde detectoren, maar onderscheid tussen verschillende typen metalen is moeilijker. Vanwege de speciale behoeften toen ik dit project startte wordt op deze pagina een puls inductie metaaldetector beschreven met zoveel onderscheid detectie als mogelijk. Om dit te bereiken wordt het verwerken van de signalen volledig digitaal gedaan door een digitale signaal processor, DSP.
Zoekspoel ontwerp
Er circuleren vele projecten op het internet van puls inductie metaaldetectoren. Hoewel ze verschillen in de manier waarop de signalen worden verwerkt is het elektronische circuit waarmee de magnetische veld pulsen worden opgewekt bijna altijd identiek.
Het belangrijkste deel om de magnetische pulsen te genereren is de spoel. De afmetingen van de spoel zijn voornamelijk afhankelijk van de gewenste detectiediepte en de minimale afmeting van objecten die nog zouden moeten worden gedetecteerd. In het algemeen kun je zeggen dat de maximale theoretische detectiediepte van een spoel vijf keer de diameter is en de minimale afmeting van een te detecteren object vijf procent van de diameter. Dit zijn maximum waarden en hangen in sterke mate af van de situatie. Zij is het duidelijk dat met een spoel van één meter het niet mogelijk zal zijn om een object van vijf centimeter doorsnede te detecteren op vijf meter diepte. Het geeft echter wel een idee welk type spoel moet worden toegepast voor een bepaald probleem. Veel mensen zullen metaaldetectoren gebruiken om munten of sieraden te zoeken. Voor die situaties is een 250 of 400 mm spoel geschikt. In mijn situatie moest ik ijzeren 100 mm waterleidingbuizen lokaliseren op een diepte van twee meter. Dat is waarom ik besloot voor een spoel van één meter.
Hoewel de fysieke afmetingen en vorm van de spoel kunnen variëren (vierkante of ovale spoelen worden gebruikt in specifieke situaties en functioneren gelijkwaardig aan ronde spoelen), variëert de zelfinductie van de spoelen slechts beperkt tussen de verschillende fysieke ontwerpen. De algemeen geaccepteerde optimale zelfinductie van een zoekspoel voor puls inductie metaaldetectoren ligt tussen de 300 en 500 µH. Voor dit project zal ik aannemen dat spoelen van 400 µH gebruikt worden. Voor kleinere spoelen betekent dit in het algemeen een groter aantal windingen.
De zoekspoel moet kunnen worden gevoed van algemeen beschikbare voedingen. Vanwege het analoge circuit om de kleine wevelstroomsignalen te versterken die worden opgevangen nadat de magnetische puls is gestopt is een dubbele voeding van ±10 Volt of ±12 Volt het meest praktisch. De spoel zal slechts via één van de twee voedingszijden worden geladen wat een asymetrische batterijontlading heeft als we twee afzonderlijke batterijpacks gebruiken voor de positieve en de negatieve voedingsspanning. Daarom zullen we slechts één batterijpack toepassen van 10 of 12 Volt en de andere zijde van de spanning genereren met een DC/DC converter. Hoewel deze techniek wordt toegepast in de meeste commerciële en zelfbouw metaaldetectors circuits is het verre van ideaal. Het grote probleem is dat de spanning die door de DC/DC converter wordt gegenereerd niet volledig vlak is en speciaal op de hoge frequenties waar wij mee werken kan dit ongewenste terugkoppelingen veroorzaken. We stellen dit probleem nu echter uit tot de paragraaf over de voedingsunit en zullen nu alleen aannemen dat de spoel wordt geladen met een spanning ergens tussen 9 en 15 Volt (afhankelijk van de daadwerkelijke keuze van het batterijpack, de ladingstoestand van de batterijen etc.)
Wanneer deze spanning wordt toegevoerd aan de spoel via een snelle bipolaire transistor of MOSFET zal de stroom in de spoel geleidelijk toenemen totdat die wordt begrensd door de interne weerstand van de speol, de laadtransistor en mogelijke andere componenten met weerstand in de lijn. Hoe langer we laden, deste groter het magnetische veld zal zijn. Dit heeft voordelen en nadelen. Sterkere magnetische velden kunnen dieper in de bodem doordringen. Maar als we een langere periode dan zag maar 250µsec laden is het mogelijk dat de grond in verzadiging raakt waardoor kleine objecten niet meer te detecteren zijn door het achtergrond signaalniveau. We zullen daarom de maximale oplaadtijd moeten beperken tot rond de 250µsec, met een circuitweerstand die laag genoeg is om een voldoende grote stroom door de spoel te laten genereren in die periode. Het is niet moeilijk uit te rekenen wat de maximale stroom is die door de spoel kan vloeien. Die stroom wordt bepaald door de Ohmse weerstand van alle componenten in de lus. We kunnen veilig aannemen dat in de lus de spoel de grootste weerstand heeft. Veel vermogenstransistoren en MOSFETs gebruikt in puls inductie metaaldetectoren hebben een maximale toegestane continue stroom van 8 tot 10 Ampere. Wanneer we de spoel zo construeren dat het een weerstand heeft van tenminste 2 Ω, dan zal de maximale stroom die er vloeit nooit meer zijn dan 7,5 Ampere met het grootste batterijpack en de batterijen volledig geladen. Met 2 Ω circuitweerstand en de minimum spanning van 9 Volt, zal de stroom over de spoel ongeveer 3,2 Ampere bereiken in de hierboven genoemde 250µsec, wat meer dan voldoende is voor een algemeen toepasbare puls inductie metaaldetector met diepzoek mogelijkheden.
We hebben nu de zelfinductie en weerstand van de spoel gedefinieerd, maar dit zegt nog niet veel over het praktische ontwerp van de spoel zolang we de afmetingen niet weten. In de tabel hieronder heb ik de spoelafmetingen, draaddikte, aantal windingen en technische bouwwijze opgesomd van een aantal praktisch toepasbare spoelafmetingen. In alle gevallen heb ik gebrobeert de zelfinductie en interne weerstand zo dicht als mogelijk bij de hierboven genoemde waarden te krijgen. Dit vermindert probemen met laadpuls lengte en ontlaadweerstand waarden bij het verwisselen van spoelen.
| Afmeting | Vorm | Windingen | Draad | Zelfinductie | Weerstand |
|---|---|---|---|---|---|
| Ø 120 mm | Rond | 36 | Ø 0.40 mm / 0.14 mm² | 405 µH | 1.9 Ω |
| Ø 150 mm | Rond | 31 | Ø 0.40 mm / 0.14 mm² | 394 µH | 2.0 Ω |
| Ø 175 mm | Rond | 28 | Ø 0.40 mm / 0.14 mm² | 387 µH | 2.1 Ω |
| Ø 200 mm | Rond | 26 | Ø 0.40 mm / 0.14 mm² | 406 µH | 2.2 Ω |
| Ø 250 mm | Rond | 22 | Ø 0.40 mm / 0.14 mm² | 380 µH | 2.3 Ω |
| Ø 300 mm | Rond | 20 | Ø 0.50 mm / 0.20 mm² | 390 µH | 1.6 Ω |
| Ø 400 mm | Rond | 17 | Ø 0.50 mm / 0.20 mm² | 396 µH | 1.8 Ω |
| Ø 500 mm | Rond | 15 | Ø 0.50 mm / 0.20 mm² | 400 µH | 2.0 Ω |
| 1.0 x 1.0 m | Vierkant | 10 | Ø 0.66 mm / 0.34 mm² | 406 µH | 2.0 Ω |
| 1.4 x 1.4 m | Vierkant | 8 | Ø 0.66 mm / 0.34 mm² | 387 µH | 2.2 Ω |
| 1.8 x 1.8 m | Vierkant | 7 | Ø 0.80 mm / 0.50 mm² | 398 µH | 1.7 Ω |
De waarden in deze tabel zijn theoretisch en kunnen variëren aan de hand van de manier waarop de spoelen worden gewikkeld. Met name de zelfinductie kan behoorlijk afwijken bij zelfs kleine veranderingen in de afstand tussen de draden. Het is niet nodig hier te bang voor te zijn. De spoel zal nog steeds goed functioneren, zelfs als de zelfinductie 10 tot 20% afwijkt van de hier opgegeven waarden. De ronde spoelen moeten worden gewikkeld van gelakt koperdraad. De afmetingen 0,14mm² en 0,20mm² zijn gangbare diktes en zijn te verkrijgen bij de grotere elektronica zaak of via postorder. De vierkante spoelen zijn gemaakt van meeraderige datakabels. Meeraderige kabels 10×0.34mm², 8×0.34mm² en 7×0.50mm² worden gemaakt door fabrikanten zoals Unitronic om sensoren aan te sluiten in industriële toepassingen. Zorg ervoor een kabel voor dit doel te kopen zonder afscherming.
De ontlaadcurve en onderscheid
De detectiecyclus van pulse inductie metaaldetectoren begind direct nadat het magnetische veld is afgeschakeld. Hiervoor wordt een bipolaire power transistor of MOSFET gebruikt die de spoel met de voedingsspanning verbindt. De ontlaadcurve van de spoel kan in drie stukken worden opgedeeld.
Fase 1: Doorslag door de driver MOSFET
In de meeste ontwerpen van metaaldetectoren worden MOSFETs gebruikt om de stroompulsen door de zoekspoel te sturen. Ons ontwerp zal ook een MOSFET voor deze taak gebruiken. Wanneer de MOSFET gesloten is wordt de stroom in de spoel ontladen over een weerstand in de stroomlus die precies aangepast moet zijn op de zelfinductie van de spoel. Voor een ideale demping van een 400µH spoel wordt een weerstand van ongeveer 680Ω gebruikt. Spoelen met een zelfinductie van 300µH zouden over een weerstand van 600Ω moeten worden ontladen. Wanneer we de spoel eerst hebben opgeladen tot een stroom van 2 Ampere, is het niet moeilijk met de Wet van Ohm te berekenen dat met een 680Ω weerstand de spanning zal pieken tot 1360 Volt. Er zijn slechts weinig commerciëel beschikbare elektronicacomponenten die in staat zijn deze spanning te weerstaan en speciaal power MOSFETs die gebruikt worden voor het sturen van metaaldetector zoekspoelen slaan ergens tussen de 300 en 750 Volt door, afhankelijk van het merk en model. Dit betekent dat gedurende de eerste fase van de spoelontlading de spanning over de spoel wordt begrensd op zo’n 500 Volt, waarbij een deel van de stroom afgevoerd wordt door de dempweerstand en een ander deel door de MOSFET. Dit is niet optimaal omdat hogere ontlaadspanningen een snellere uitschakeling van het magnetische veld betekenen, maar we moeten gelukkig zijn dat dit intrinsieke gedrag van de MOSFET feitelijk voorkomt dat andere componenten in de schakeling beschadigd raken.
De tijd die het systeem in fase 1 verblijft hangt af van de stroom die door de spoel vloeide toen de ontlading werd gestart, de doorslagspanning van de MOSFET en de som van de weerstanden van de spoel, bedrading en ontlaadweerstand. Wanneer we aannemen dat het grootste veel van de weerstand in de kring wordt veroorzaakt door de dempweerstand kunnen we de lengte van fase 1 berekenen met de volgende formule:
Ts1 = Lcoil * ( Icoil – Vbrk_down/Rdamp ) / Vbrk_down
Het is duidelijk dat deze formule alleen geldig is wanneer Icoil > Vbrk_down/Rdamp, omdat anders fase 1 nooit bereikt wordt en de ontlaadcurve direct begint met fase twee. In ons voorbeeld met een 400µH spoel, 680Ω dempweerstand, een initiële spoelstroom van 2 Ampere en een MOSFET doorslagspanning van 500 Volt zal deze eerste fase één microseconde duren.
Fase 2: stroomafbouw over de de dempweerstand met hoge spanningen
Wanneer de spanning die door de stroom in de spoel is opgewekt een waarde heeft bereikt die ligt beneden de doorslagspanning van de MOSFET zal de stroom exponentiëel afnemen naar nul. De parameters die invloed hebben op dit verval zijn de totale weerstand in de stroomkring en de fysieke eigenschappen van het magnetische veld in de spoel. Metalen in het bereik van de magnetische veldlijnen kunnen de tweede fase van de ontlaadcurve beïnvloeden, maar er zijn enkele praktische problemen om die te detecteren. Ten eerste zijn de spanningen in deze fase nog zeer hoog. Fase 2 begint wanneer de spoelspanning beneden de doorslagspanning van de MOSFET komt (ergens rond de 500 Volt) en eindigt wanneer de spanning voldoende afgenomen is om te worden opgepikt en versterkt door normale analoge versterkingscircuits (meestal rond de 0,5 of 1 Volt). De fase is bovendien erg kort wat het moeilijk maakt om betrouwbare metingen doen die informatie geven over de aanwezigheid van, of het onderscheid tussen metalen in het bereik van het magnetische veld.
De meeste puls inductie metaaldetectoren zullen daarom deze tweede fase overslaa en wachten op de derde fase om te beginnen met de detectie en onderscheid cyclus. Onze DSP gebasseerde detector is anders omdat het het exacte moment kan detecteren wanneer de ontlaadcurve over gaat van fase 2 naar fase 3.
Wanneer we kijken naar algemeen gangbare schema’s voor het verwerken van signalen van puls inductie metaaldetectoren dan heeft de dempweerstand twee parallel in omgekeerde richting geplaatste diodes in serie. Deze diodes functioneren als een overspanningsbeveiliging door één zijde van de weerstand hard naar één van de voedingsspanningzijden te trekken. Dit is de voedingsspanningzijde die wordt gebruikt als de virtuele nul in de analoge verwerking van het signaal. Zolang de spoelspanning groter is dan 0,7 Volt zal één van deze twee diodes open staan en is de spanning over de diodes praktisch constant. Wanneer de spoelspanning beneden deze waarde valt zullen de diodes sluiten en is de gemeten spanning de werkelijke overblijvende spanning over de spoel.
In onze voorbeeldspoel zal fase 2 ongeveer 3,9µsec duren totdat de spoelstroom voldoende is afgenomen om de spanning beneden deze magische waarde van 0,7 Volt te brengen. Dit betekent praktisch gesproken het eind van de tweede fase van de ontlaadcurve en het begin van de laatste fase waar de wervelstromen kunnen worden gedetecteerd. Wanneer metalen in de reikwijdte van het magnetisce bveld zijn zal het moment waarop de derde fase begint verschuiven. Ferro-magnetische metalen zullen de zelfinductie van de spoel verhogen wat praktisch gesproken leidt tot het verlengen van fase 2. Andere metalen zullen de derde fase juist eerder laten starten. Ik hoef niet uit te leggen dat voor een exacte bepaling van het transitiepunt we een goed en snel analoog meetsysteem ndig hebben en een snelle berekeningscyclus van de controller. Dit is waar onze digitale signaalprocessor wordt gebruikt.
Fase 3: Finale stroomafbouw en wervelstromen
In de laatste fase wordt de dempweerstand geblokkeerd door de twee seriediodes en de stroom wordt verder afgebouwd over andere weerstanden in het circuit. De stromen die nu vloeien zijn de overblijfselen van de initiële spoelstroom en stromen die worden opgewekt door wervelstromen van metalen in de omgeving. Dit is historisch gezien de fase waar analoge en microcontroller gebasseerde puls inductie metaaldetectoren hun signaalanalyse doen. Signaalanalyse in dit gebied is om twee redenen lastig. Ten eerste zijn de signaalniveaus zeer klein waardoor een versterking van honderd to duizend maal nodig is om enige informatie te verkrijgen. Dit zal ook de storingen in het signaal versterken. Het tweede probleem is dat het belangrijkste gebied om onderscheid te maken tussen verschillende metalen ligt in de eerste 30 microseconden van de vervalcurve. Door in het ontwerp dit eerste deel van de vervalcurve te negeren wordt een goed onderscheid tussen metaalsoorten extreem moeilijk.
Analoge puls inductie metaaldetectoren en eenvoudige microcontroller gebasseerde versies gaan zelfs een stap verder door niet te kijken naar de signaalvorm zelf, maar door het signaal te middelen met een integtatie condensator en door de eindspanning van deze condensator te gebruiken om te bepalen of metaal is gedetecteerd. Dit zal een hoop storing reduceren die gecreëerd is door de hoge versterkingsfactor in de voorversterkingsfase, maar door het signaal te integreren verdwijnt alle metaalspecifieke informatie. Dat is waarom algemeen beschikbare puls inductie metaaldetectoren zo slecht zijn in onderscheid. Ze gooien eerst bijna alle informatie weg, sommeren wat overgebleven is en zeggen dan: “He, ik heb kennelijk wat gedetecteerd maar vraag met niet hoe en wanneer!”.
De ontlaadcurve in een grafiek
Een mogelijke grafiek van de ontlaadcurve aan de ingangszijde van onze detectieelektronica kan in de volgende afbeelding worden gezien. De roode lijn is de ontlaadcurve wanneer er geen metaal in het bereik is, de andere twee lijnen laten het verschil zien wanneer een object in de reikwijdte van het magnetische veld komt.
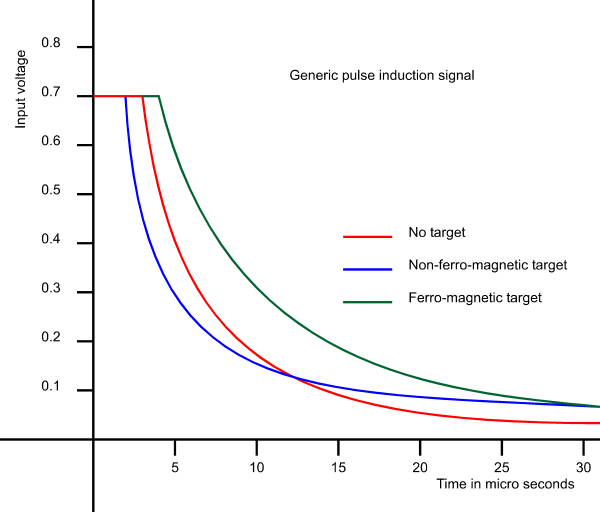
Gedurende de eerste vijf microseconden wanneer de ontlaadcurve in fase 1 en fase 2 is, wordt het signaal begrensd door de beschermingsdioden in het ingangscircuit. Daarna neemt de curve langzaam af, waarbij het verval afhankt van de aanwezigheid van een object en de geleidbaarheid van een object. In het boveneind van de grafiek zullen ferro-magnetische metalen een korte vertraging veroorzaken van het moment waarop het signaal beneden de 0,7 Volt daalt, terwijl andere metalen dat punt juist een beetje vroeger verplaatsen. Goed geleidende metalen zoals goud, zilver en koper zullen een steile curve hebben en snel naar 0 vervallen. We zien dat na zo’n 30 microseconden het maken van onderscheid tussen de verschillende metalen praktisch onmogelijk is. Door een groot aantal van deze curves in de praktijk de analyseren is het mogelijk een onderbouwde gok te maken over het materiaal van het object dat door de puls inductie metaaldetector is gedetecteerd. Zoals met alle metaaldetectoren is dit een onderbouwde gok en geen absoluut antwoord omdat grootte, diepte, andere objecten in de omgeving en bodemreacties het signaal dusdanig kunnen vervormen dat een goed onderscheid niet mogelijk is.
Ontwerp van de voeding
Eén van de grote problemen tijdens het ontwerp an een goede puls inductie metaaldetector met digitale signaal verwerking is een correct ontwerp van de voedingsunit. Het systeem zal drie vermogensverbruikers krijgen met elk hun eigen wensen. Piekstromen in één deel van de voedingsunit mogen geen negatief effect hebben op andere delen in het systeem. De analoge en digitale nul moeten ook zo goed als mogelijk gescheiden worden gehouden. Dit is niet eenvoudig te bereiken want we willen bovendien het hele circuit voeden vanuit één batterijpack.
Voeding van de spoel
De spoel is zonder twijfel de grootste stroomverbruiker in het circuit. Pulsen die een aantal Amperes kunnen bereiken worden gegenereerd door de spoel vie een MOSFET aan en uit te schakelen. Daarom zou de spoel direct uit de batterij gevoed moten worden. Geen lineaire voedingsregelaar of DC/Dc converter zal genoeg vermogen kunnen leveren om deze korte stroompieken te leveren zonder grote effecten ergens anders in het systeem. We kunnen een kleine serieweerstand en een grote buffercondensator toepassen om de voorkomen dat de batterijen te hoge stromen moeten leveren.
Voeding van de analoge versterker
De analoge versterkingstrap werkt met een dubbele voedingsspanning die ergens tussen de ±5 en ±15Volt moet liggen. Het midden van deze twee boedingen zij moeten worden verbonden met de vast aangesloten zijde van de spoel en zal praktisch gezien functioneren als de analoge nul in het systeem. De losliggende zijde zal dan worden versterkt ten opzichte van het voedingsmidden. Ons ontwerp van de eerste trap van de versterker wordt volledig differentiëel wat fouten elmineert wanneer de analoge nul niet perfect stabiel is.
Voeding van de digitale signaal processor
Digitale signaalprocessoren zijn ontworpen om te werken bij 3,3 Volt, 5 Volt of beide. Ik zal de hogere voedingsspanning gebruiken voor twee redenen. Ten eerste heeft ervaring mij in het verleden geleerd dat met 5 Volt gevoede processoren minder problemen hebben met inteferentie. Maar de belangrijkste reden is dat het DSP model dat ik wil gebruiken alleen de snelste ADC conversiemoethode kan gebruiken wanneer een 5 Volt voedingsspanning is aangesloten. De positie van de voedingsspanning in het circuit is een lastige. Om de spoel MOSFET te schakelen zou de nullijn van de DSP idealiter verbonden moeten zijn met de 0 van de MOSFET, wat aan de uiteinden ligt van de voedingsspanningen. Maar voor een goede verwerking van de analoge signalen uit de versterkerstrap zou de nul van de DSP rond de nul van de versterkerstrap moeten liggen, wat in het centrum van de uiterste voedingsspanningen ligt. Omdat het gemakkelijker is om de spanningsniveaus van de analoge trap te verschuiven met een differentiele versterker dan het is om de MOSFET vanaf een willekeurig spanningsniveau te schakelen zullen we de digitale componenten tegen de negatieve voedingsspanning plaatsen. Dit creëert ook een automatische scheiding tussen de analoge en digitale 0 wat storingsproblemen reduceert.
Schema van de voeding
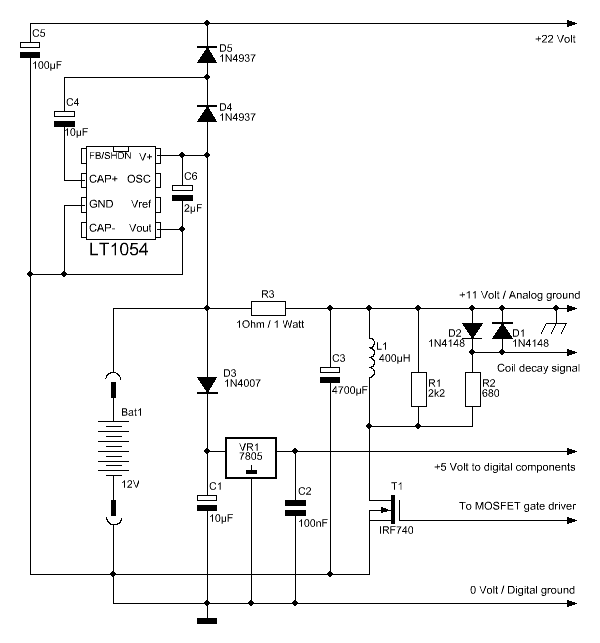
Na alle wensen gecombineerd te hebben is de eenvoudigste te bouwen voedingseenheid van het circuit zoals in de volgende afbeelding. De spoel wordt bijna direct uit de batterij gevoed. Ik zeg hier “bijna direct”, omdat een kleine weerstand en grote condensator worden gebruikt om de piekstromen te beperken. De digitale componenten worden dicht bij de negatieve voedingslijn geplaatst. Een lineaire spanningsregelaar, condensatoren en een diode moeten voorkomen dat te veel storing gegenereerd door de digitale componenten terug kan vloeien in het analoge circuit. De opamps in de analoge versterker hebben een dubbele voedingsspanning nodig om te werken. Het bovenste deel van die voeding wordt gegenereerd door het LT1054 IC dat hier in een spanningsverdubbelaar configuratie is geschakeld.
Praktisch gesproken functioneert het verbindingspunt tussen R3, C3 en de zoekspoel als analoge nul. Dit nulniveau zal op en neer gaan tijdens de ladd en ontlaadcyclus van condensator C3, maar dit zal geen negatief effect hebben op de analoge versterker, omdat het ingangscircuit van de versterkertrap volledig differentiëel zal zijn.
Het is te zien dat zowel de + als de – aansluiting van de batterij gedefiniëerd zijn als sterpunt. Dit is ook van belang bij het ontwerpen van de printplaat. Door zo kort mogelijke gezamelijke leidingen tussen de drie belangrijkste verbruikers (spoel, processor en analoge versterker) wordt de kans op inteferenties tussen deze componenten kleiner.
|
Politics is not a bad profession.
If you succeed there are many rewards,
if you disgrace yourself you can always write a book.
RONALD REAGAN
|